 返回
返回
近2500台的汽车行业AGV集采项目缘何提及视觉纹理导航?
时间:2022-03-25 来源:移动机器人产业联盟
近期,某汽车厂商的招标文件显示,一个近2500台货架搬运AGV集采项目,对导航方式的技术要求提及视觉纹理导航。





什么是视觉纹理导航?
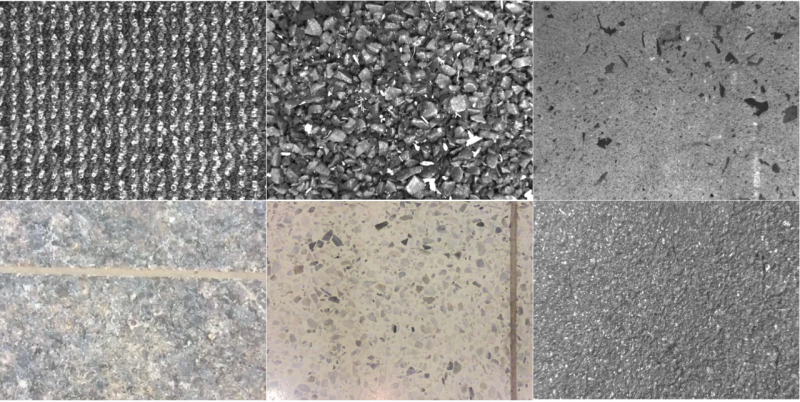
视觉纹理导航属于视觉导航(V-SLAM技术)的范畴之一,通过AGV车载视觉传感器获取运行区域周的图像信息来实现导航的方法。硬件上需要下视摄像头,补光灯和遮光罩等来支持该种导航方式的实现,利用丰富的纹理信息,基于相位相关法和非均匀傅里叶变换来计算出两图间的位移和旋转关系,实现图像匹配,生成路径地图;从环境中获取海量的、富于冗余的纹理信息,拥有超强的场景辨识能力,是全新的无轨导航技术路线。
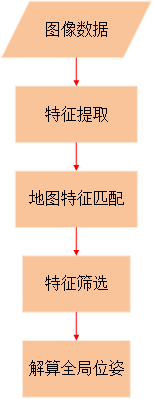
纹理导航算法首先对相机采集的图像进行视觉特征提取,这里的视觉特征主要指点、线及结构特征等;然后,算法会将提取得到的特征与导航地图库中的特征进行匹配、筛选,得到地图库中对应的匹配特征,根据两对特征的相互映射、转换关系解算实时全局位姿,完成AGV设备的导航定位。
视觉纹理导航在视野被部分遮挡/污染,甚至大半部分遮挡/污染时,仍然能够提供准确的导航定位信息,具有更强的鲁棒性。
在场地长时间使用,积灰、污损严重的情况下,纹理导航可以根据单帧图像的匹配情况,自行判断是否需要进行地图库的特征更新,以适应地面环境的渐变,从而减少人工介入场地维护的频率。
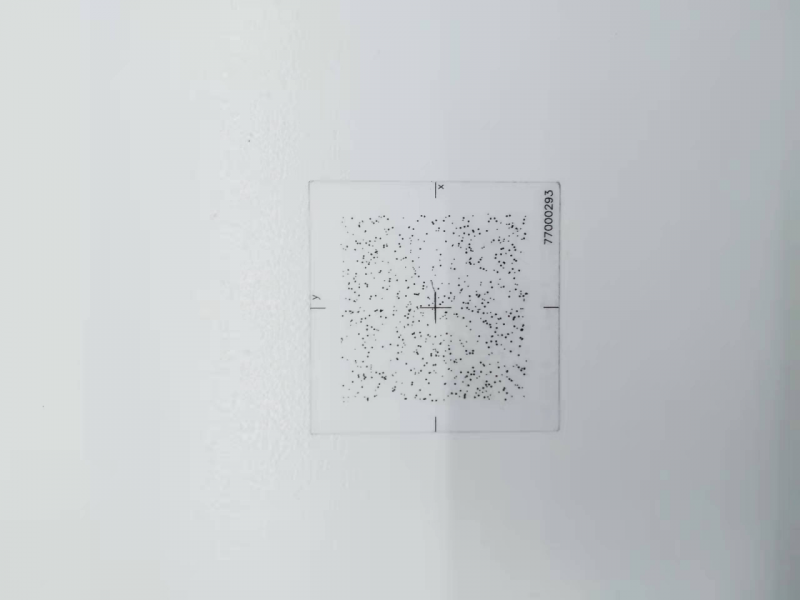
针对本身没有视觉特征的场地,可以使用定制化的纹理码解决方案。该方案能够自动生成地图特征库,并定制指定颜色的纹理特征码,使码与环境地面融为一体,从视觉上减少场地中纹理码的存在感,实现了场地美观与高精度导航的融合。
视觉纹理导航在视野被部分遮挡/污染,甚至大半部分遮挡/污染时,仍然能够提供准确的导航定位信息,具有更强的鲁棒性。
在场地长时间使用,积灰、污损严重的情况下,纹理导航可以根据单帧图像的匹配情况,自行判断是否需要进行地图库的特征更新,以适应地面环境的渐变,从而减少人工介入场地维护的频率。
针对本身没有视觉特征的场地,可以使用定制化的纹理码解决方案。该方案能够自动生成地图特征库,并定制指定颜色的纹理特征码,使码与环境地面融为一体,从视觉上减少场地中纹理码的存在感,实现了场地美观与高精度导航的融合。
视觉纹理导航目前应用如何?
2019年新松机器人为国内某知名车企在总装车间的仪表线、电池线、门段拣选线等产线提供数十台物流配送AGV。项目在实施过程中,原定选用的是激光SLAM导航,由于部分生产线边特征点不明显,环境特征变化太多,导致SLAM导航精度不高,定位不准,影响了使用效率。经过分析后,新松辅以纹理导航解决了因局部区域特征变化较大而产生的问题。在特殊路段,通过对现场地面纹理的拍摄,与AGV本体已有纹理模型构图进行比对,从而确定精确位置,提高了现场的导航精度和定位精度,满足了客户的使用效率要求。
合肥井松为上汽通用东岳打造的仓储项目,整个仓库共有货架956个,每个货架5层,可以存放料箱34416个,货物种类与吞吐流量极为庞大。井松为仓库布置了21台视觉纹理导航机器人来实现整个仓库的自动化搬运,通过中央调度系统进行智能分析,合理调配每一台机器人完成各种物料的进出。
此外,怡丰机器人在珠海格力与杭州富士康项目中也使用了该导航技术
海康机器人为博世华域转向首创Smart Log项目,于2019年开始前期筹备和规划设计;致力于打造全场景、全连接、全过程整体集成的,端到端 精益、敏捷、智慧供应链。项目于2020年3月开始落地实施,并于2021年3月正式上线运行。项目分三期投入海康机器人潜伏及叉取AMR,作业范围覆盖南京工厂的生产车间、原材料仓库、成品仓库,涉及物流中心原材料的存储、质检、翻包、分拣、配送及成品配送、存储等全流程业务,实现机器人调度系统RCS-2000与用户仓储管理系统WMS的对接,全程产线无缝切换,满足南京工厂智能化物料搬运与精益化生产管理需求。
在某光伏行业的物料搬运流程中,华睿科技AGV将激光导航和视觉纹理导航相结合,充分发挥了各自的优势,实现了复杂环境下的高执行效率和高定位精度。现场日均搬运任务多达15000+,24小时全天候运行,设备已稳定运行6个月,AGV纹理导航的稳定性、可靠性经过了充分的考验,经过长期测试,设备的运行、对接精度也达到了毫米级的标准。
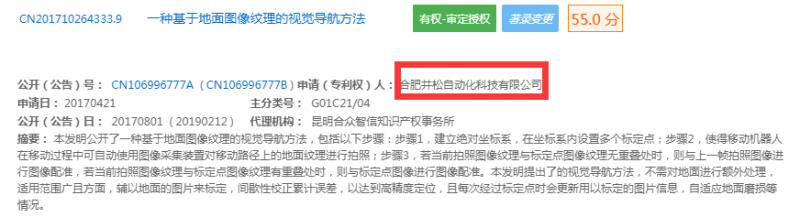
视觉纹理导航专利情况如何?
新战略移动机器人产业研究所通过专利检索发现,目前该导航方式为发明专利,主要专利人为合肥井松自动化科技有限公司与上海懒书智能科技有限公司所有,发明人均为刘诗聪。
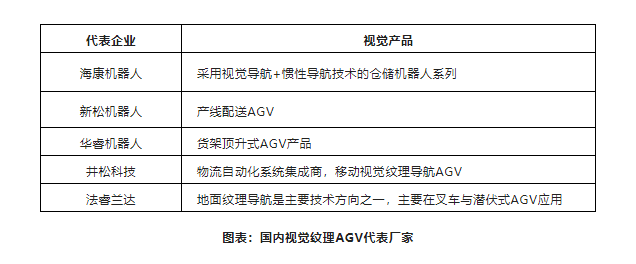
视觉纹理导航市场主要玩家?
视觉纹理导航是最近几年年才被提及的技术,也落地了不少项目,视觉纹理导航的精准性与经济性是其主要的优势,在具备合适的地面情况下,纹理导航不失为一种选择方案。
AGV的发展过程中,对车辆以及执行部件的定位精度要求也越来越高。虽然用于自动化流水线的视觉导航系统,可以做到0.1mm的定位精度,但基于无固定参照的视觉导航AGV,其定位精度往往不高(纯视觉导航)。此外,视觉导航对光的依赖程度高,在暗处或者一些无纹理区域需要借助辅助传感器。
标签:
- 免费下载!《2026轮式人形机器人产业发展蓝皮书》
时间:2026-05-28
- 赢了,井松是冠军!!!
时间:2026-05-26
- 全球无人叉车大赛2.0:井松,到!
时间:2026-05-19
- 高仙拿下全球No.1,机器人在传统清洁中杀出重围
时间:2026-05-14
- 智慧交锋,决战巅峰时刻!第四届启智杯全国总决赛燃爆杭城!
时间:2026-05-08
中国移动机器人(AGV/AMR)产业联盟