 返回
返回
海康机器人光伏应用 | 看3D视觉如何搞定无序/有序抓取
时间:2024-06-21 来源:移动机器人产业联盟
随着光伏行业自动化生产与海外设备需求剧增,行业智能化升级迫在眉睫。当前,光伏组件生产中的接线盒安装与铝边框上料仍依赖人工,生产效率及稳定性、可靠性提升难度较大。
由此海康机器人推出了3D视觉引导光伏接线盒上下料、光伏板封边型材抓取两大方案,轻松搞定无序/有序抓取,助力光伏组件环节自动化与智能化。
3D视觉引导光伏接线盒上下料
光伏接线盒是光伏发电系统中起连接和保护的必要组件,其主要作用是将太阳能电池中产生的电力与外部相连接,是电流传导的桥梁。
Q:种类繁多,来料无序
光伏接线盒上料属于整个组件生产的后端工序,由于种类繁多、来料无序、表面材质黑色吸光,传统只能通过人工上料安装或者“人工理料+机构辅助”的方式进行上料装配,人工依赖性强,上下料效率有限。
A:3D视觉无序抓取方案
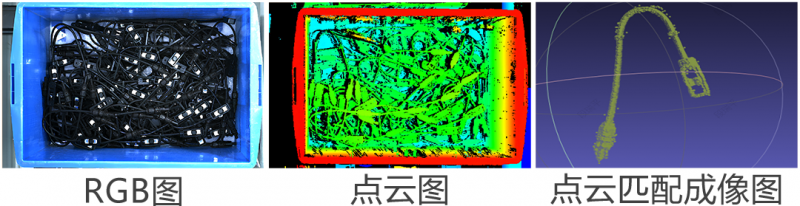
海康机器人使用激光振镜立体相机对料框进行定位,实现动态障碍物识别,结合实例分割+3D点云匹配准确定位接线盒,配合工件与抓取点选解排序算法,实现最优抓取策略,引导机器人从料框中抓取散乱堆叠的光伏接线盒。
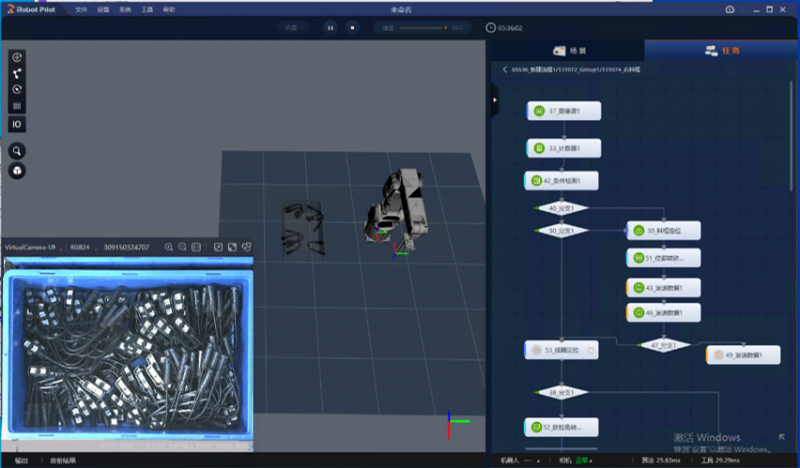
成像效果
方案优势
激光振镜立体相机,可获取高质量、完整的光伏接线盒、线束、扎带的点云
超级AI模型,可适配市面上主流的接线盒类型,如O型、X型、U型等
支持主流机器人品牌一键手眼标定,支持适配工件免抓取点注册
抓取效率高,视觉系统处理节拍≤3s/pcs
抓取成功率高,≥99%
3D视觉引导光伏板封边型材抓取
太阳能光伏板是太阳能系统中的核心部分,其作用是将太阳能转化为电能,或送往蓄电池中储存起来。由于单体太阳能板不能直接作为电源使用,作电源必须将若干电池串、并联起来,并严密封装成组件。
Q:型材正反面放置异常
传统生产使用“人工+弹夹”的方式进行铝边框型材上料,工作强度大,易出现型材正反面放置错误等异常情况,影响整体生产效率。
A:3D视觉有序抓取方案
为解决上述问题,海康机器人提供两种解决方案。
方案1:中部抓取
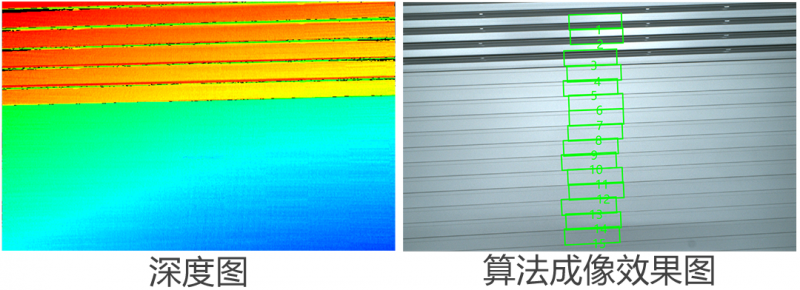
如客户提供型材长度方向的坐标信息,可选择使用激光振镜立体相机拍摄型材中间部位,RP处理后输出一组型材抓取点引导机械臂进行抓取。
抓取示意
成像效果
方案2:两端抓取
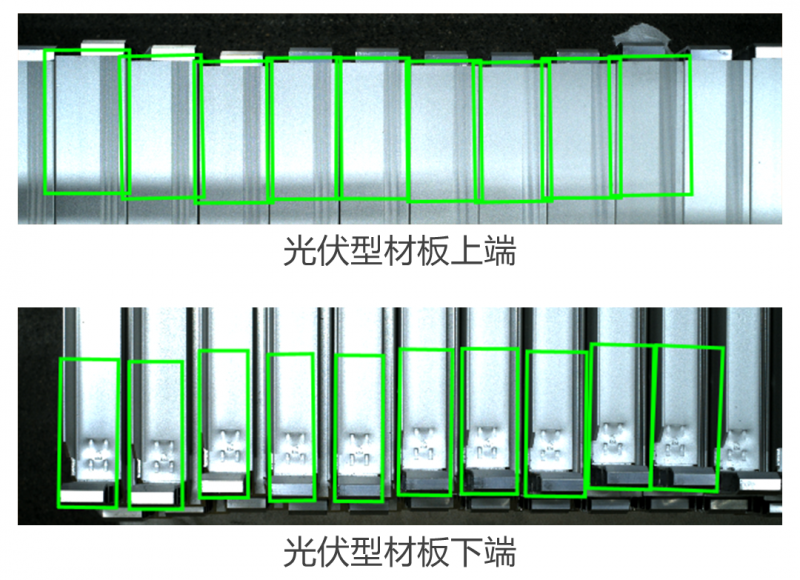
如客户不提供信息,若使用工业机器人,可使用一台激光振镜立体相机分别在型材两端拍照;若应用在桁架系统上,可以使用两台激光振镜立体相机,分别在型材的两端进行拍摄。拍摄取图后在算法内部进行点云融合定位,完成多根型材排列融合输出一组型材的抓取点。
抓取示意
成像效果
方案优势
采用激光振镜立体相机,亚毫米级精度
支持根据型材料框规则程度,给出最优型材抓取策略
支持型材正反识别,支持非满托型材拆垛
支持隔离纸定位去除
抓取效率高,视觉系统处理节拍≤2.5s/pcs
应用案例
由此海康机器人推出了3D视觉引导光伏接线盒上下料、光伏板封边型材抓取两大方案,轻松搞定无序/有序抓取,助力光伏组件环节自动化与智能化。
3D视觉引导光伏接线盒上下料
光伏接线盒是光伏发电系统中起连接和保护的必要组件,其主要作用是将太阳能电池中产生的电力与外部相连接,是电流传导的桥梁。
Q:种类繁多,来料无序
光伏接线盒上料属于整个组件生产的后端工序,由于种类繁多、来料无序、表面材质黑色吸光,传统只能通过人工上料安装或者“人工理料+机构辅助”的方式进行上料装配,人工依赖性强,上下料效率有限。
A:3D视觉无序抓取方案
海康机器人使用激光振镜立体相机对料框进行定位,实现动态障碍物识别,结合实例分割+3D点云匹配准确定位接线盒,配合工件与抓取点选解排序算法,实现最优抓取策略,引导机器人从料框中抓取散乱堆叠的光伏接线盒。
安装方式 |
Eye-to-hand (固定式安装) |
架设高度 |
相机架设于料框正上方,相机镜头位置与料筐上 平面距离1200mm |
覆盖视野 |
在该拍摄距离下,相机可覆盖最大视野约 520*580mm(L*W) |
方案优势
激光振镜立体相机,可获取高质量、完整的光伏接线盒、线束、扎带的点云
超级AI模型,可适配市面上主流的接线盒类型,如O型、X型、U型等
支持主流机器人品牌一键手眼标定,支持适配工件免抓取点注册
抓取效率高,视觉系统处理节拍≤3s/pcs
抓取成功率高,≥99%
3D视觉引导光伏板封边型材抓取
太阳能光伏板是太阳能系统中的核心部分,其作用是将太阳能转化为电能,或送往蓄电池中储存起来。由于单体太阳能板不能直接作为电源使用,作电源必须将若干电池串、并联起来,并严密封装成组件。
Q:型材正反面放置异常
传统生产使用“人工+弹夹”的方式进行铝边框型材上料,工作强度大,易出现型材正反面放置错误等异常情况,影响整体生产效率。
A:3D视觉有序抓取方案
为解决上述问题,海康机器人提供两种解决方案。
方案1:中部抓取
如客户提供型材长度方向的坐标信息,可选择使用激光振镜立体相机拍摄型材中间部位,RP处理后输出一组型材抓取点引导机械臂进行抓取。
安装方式 |
Eye-in-hand (臂载式安装) |
架设高度 |
相机拍照点可覆盖型材正中间,净距离大于400mm |
实施条件 |
提供型材长度方向的坐标信息 |
视觉策略 |
使用相机拍摄型材中部,RP输出一组型材抓取点引导机械臂进行抓取 |
抓取示意
成像效果
方案2:两端抓取
如客户不提供信息,若使用工业机器人,可使用一台激光振镜立体相机分别在型材两端拍照;若应用在桁架系统上,可以使用两台激光振镜立体相机,分别在型材的两端进行拍摄。拍摄取图后在算法内部进行点云融合定位,完成多根型材排列融合输出一组型材的抓取点。
安装方式 |
Eye-in-hand (臂载式安装) |
架设高度 |
相机拍照点可覆盖型材边缘,净距离大于400mm |
实施条件 |
未提供型材长度方向的坐标信息 |
视觉策略 |
相机在型材两端拍照,算法内部点云融合定位,多根型材排列融合输出一组抓取点 |
抓取示意
成像效果
方案优势
采用激光振镜立体相机,亚毫米级精度
支持根据型材料框规则程度,给出最优型材抓取策略
支持型材正反识别,支持非满托型材拆垛
支持隔离纸定位去除
抓取效率高,视觉系统处理节拍≤2.5s/pcs
应用案例
标签:
- 0烂尾项目,超60%营收来自新能源!创智科技背后藏着什么?
时间:2026-06-16
- 当公牛开始向细节要答案,一场无声的3C智造革命正在发生
时间:2026-06-11
- 订单暴涨10倍后,开普勒等来了它的“A股船票”
时间:2026-06-09
- 持续“小爆单”,产能告急盖楼解决!江苏这家电池厂有多猛?
时间:2026-06-10
- LET现场直击:物流全链路如何提质提效?华南这个展给你答案!
时间:2026-06-05
中国移动机器人(AGV/AMR)产业联盟